Synthetic Reflexes for
Robots, Processes, Avatars, and Prostheses
Content Version: 0.1.4
Hover over line items for more information.
INTRODUCTION
If we have AI, why do we need a Brain Building Kit?
AI is the sizzle. Synthetic Reflexes is the steak
AI expresses human intention through machines.
Expert systems benefit from human expertise.
AI does not emulate brain structure/function.
It captures high-quality high-value solutions
including adaptability to problem variations.
Modern AI began in the late 1950s and early 1960s using
ideas of Norbert Wiener and Walter Pitts based on
the hypothesis that a neuron collected information
and delivered a single pulse when conditions were met.
Intelligence is seductive and well-funded
AI wins chess and go games.
AI discovers hidden associations in big data.
AI imitates live pilots in autonomous vehicles.
AI adds value to products and services.
From playing chess and go to discovering patterns in big data,
countless teams are organized to find methods
to extract value using cybernetics and associative connections.
but REFLEX is what keeps animals running
From knee-jerk and gaze vergence to running and throwing,
the spinal cord performs sophisticated recruitment
of motor system oppositions based on sensory inputs.
Autonomic functions and postural maintenance as well as
imitating other animals can be done for fun and profit.
Both The BBK and real brains exhibit reflexes
Sir Charles Sherrington (Nobel prize 1932) said
"The brain is the crowning achievement of the reflex system".
The BBK implements economical, maintainable, smooth,
reliable, and injury-resistant reflexes; not intelligence.
The BBK maps reflexes into machines.
This makes products and services cheaper and more reliable.
COMPETITORS
Why Are Nervous Systems Hard?
No simple models of neurons are published
Neurons are cells in community acting for common good.
Many complex theoretical models are in use.
One uses a dendritic antenna and a pulse generator.
Another forms association coefficients between "factoids".
None resemble actual neurons in structure or function.
AI speculations model complex functions
AI researches abstract solutions to complex problems.
Solutions are re-engineered on artificial machines.
Implementations may or may not resemble neural solutions.
Expert solutions may not embody legacy knowledge.
HTM, neural nets, and neuromorphics simplify
Weakly associated networks can simulate some neural actions.
They can connect, strengthen, weaken, and disconnect.
Effectively, these are resonators for repeating data.
They increase the Signal/Noise ratio over many samples.
These can be very effective machines.
But the similarities to neurons end quickly on "drill-down".
All successfully solve high-value problems
Scientific and engineering news is very exciting.
New ways to use AI and other cybernetics are blooming.
It is an exciting time to be in AI.
But none are useful for teaching how brains work.
But all rely on the legacy model neuron
The cybernetic model proposes a single neural pulse.
The dendrite is an integrator of inputs.
When sufficiency is reached, a pulse is generated.
The pulse propagates from the axon hillock to boutons.
This is provably a minority operation, at best.
IP
Novel IP developed over 17 years (1st IP slide).
Reflexes are easier to model than intelligence
Reflexes balance outputs without making complex decisions.
It is about guaranteeing position and secretion.
No knowledge or expertise is involved.
Instead, outputs are to be varied to achieve a goal.
The BBK recreates living sensorimotor systems
Living sensory systems are very information-rich.
Living motor systems are capable of refined actions.
Both, much more so than is expected in robotics.
It emulates materials from nano to macro scale
Angstrom: Ion/protein interactions for muscle and nerve.
Nano: Aggregate sensing/actions by shapes/bundles.
Micro: Orgnized opposed aggregates.
Macro: Postural/Perceptual consolidation.
Operational reflex system need no programming
Programming is intrinsic and universal.
Reflexes are trained, not programmed.
It's chief value is reducing manufacturing/operating costs
APPLICATIONS
Where can The BBK be deployed?
Complex life-like robotic reflexes
Emulated intrinsic structures exhibit emulated actions.
Sub-pixel perception and sub-voxel movements.
Least-action and necessary/sufficient power-usage.
Simple adaptation to new conditions
A "possible" movement is trained into reflex.
Proprioception "selects" adjustments needed.
New adaptation remains as "muscle memory".
Game avatars respond like living creatures
Avatars obeying physics can have virtual reflexes.
Avatars can learn your strengths and weaknesses.
"Knowledge" is an individual property of the avatar.
Prostheses behave like natural limbs
Portions of nervous systems are viable.
A prosthesis can have native reflexes.
Prosthesis reflexes can learn too.
Individual component market value
The BBK™ can be delivered without specialization.
Specialized instances can be trained by expert staff.
Synthetic muscle market value is independent of specific use.
Synthetic retina likewise.
Valuable new insights for clinical neurologists
Use electrodes to identify/control specific signals.
Identify new differential diagnostics for known pathologies.
All this without a line of customizing code
Programming is used to generate a generic BBK™.
No programming is used to train/specialize the BBK™
TODO
What is left to do?
First demonstration robot is being designed
Some sensors/actuators have not yet been built.
Unknown impediments are likely to arise.
The scale of innovation suggests there will be many.
Bridging concepts still under development
Synthetic muscle is being refined
A muscle analog has been designed, but not built.
This design operates very like skeletal muscle.
Drill-down analysis shows similarity to twitch units.
Signal distributor driver has been designed.
Synthetic eyes are being refined
Mammalian simple lens, complex receptor plane are needed.
Insect compound eye is designed, awaiting implementation.
Synthetic midbrain and cerebellum are being refined
Potential FPGA, but sparse SISD to MIMD may be used.
Transforms known to the founder will be used.
Mack Truck Insurance
The founder has not taught the principles sufficiently.
A team must be taught the principles.
This should be a "trusted" core team.
Weekly (if not daily) seminars must be included.
COST
How much will it cost
Salaries, overhead, and other business costs
To be discussed.
Patent fees
To be discussed.
Likely initial launch costs are about $5M
Startup team size is to be discussed.
Ramp up after demonstration projected at $20M
Sustaining team size is to be discussed.
TIME
How long will it take?
A gifted staff produces a demo in 6 months
See OBJECTIVE for gross design elements.
A usable BBK for retrofitting robots in 1 year
Once a demonstration robot is made lessons are learned.
Those lessons will feed back into refining The BBK™
Synthetic reflexes should be deliverable in 1 year.
The potential has no currently conceived limit
Meeting our 1st and 2nd goal barely scratches the surface.
The potential applications take little imagination.
The IOT could be endowed with reflexes.
OBJECTIVE
First Demonstration Robot
360° 3D "Fly Eye" camera
Six legs with synthetic muscles
A BBK with eye input, leg muscle output
A switch to choose pursuit/escape
It will either chase you, or you can chase it
It plays hide and seek
SCIENCE
Basics of IP Principles
Real neurons do more than cybernetic neurons
Neural organs do more than AI clusters
Muscles do more than robotic actuators
Sensory organs do more than robotic sensors
Only principles found in living animals are used
REFLEXES
Physiological Information
Nature of Physiological Information
Sensory to Perceptual Transduction
Action to Actuation Transduction
Internal Representation and Operations
The Reflex Arc
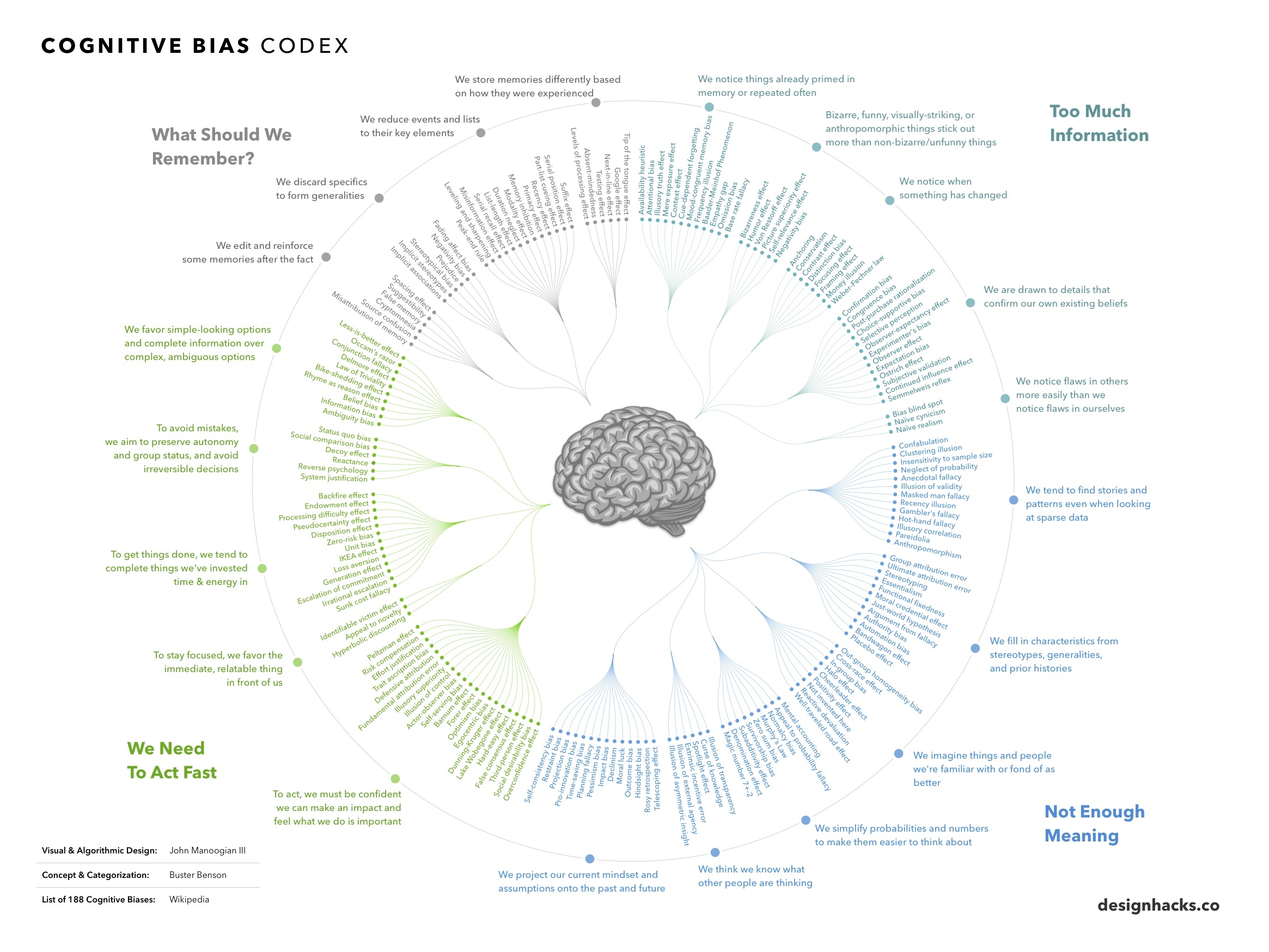
VALIDITY
Avoiding Cognitive Bias
Types of Cognitive Bias
https://www.visualcapitalist.com/24-cognitive-biases-warping-reality/ summary
https://www.visualcapitalist.com/every-single-cognitive-bias/ complete
https://en.wikipedia.org/wiki/List_of_cognitive_biases wikipedia
Quality and Absence of Sources
Interference from Accepted Theory
Speculations, Projections, and Inventions
Engineering Viability Test
Mathematical Mappability Test
Drill Down Observability Test
Working Hypotheses
LINKS
Early Demonstrations
Muscle Statics
Engineering elements of skeletal muscles are detailed.
Muscle Dynamics
Engineering principles of skeletal muscles are visualized.
Twitch unit duty cycles and efficient signaling are explored.
Tonus management is discussed.
{kind=link}
{kind=link}